Geen bewerkingssamenvatting |
Geen bewerkingssamenvatting |
||
| Regel 1: | Regel 1: | ||
[[Category: Handboek Regionale Verkeersmonitoring]] |
[[Category: Handboek Regionale Verkeersmonitoring]] |
||
[[Category: Inwinnen]] |
[[Category: Inwinnen]] |
||
| − | + | [[Category: HRVM doorvoeren commentaar]] |
|
| − | [[Category: HRVM doorvoeren commentaar]] |
||
| − | <!-- [[Category: HRVM eindcontrole]] --> |
||
<!-- [[Category: HRVM gebruiksklaar]] --> |
<!-- [[Category: HRVM gebruiksklaar]] --> |
||
| + | |||
| − | |||
<!-- Bewerkingsstatus van dit artikel wijzigen: --> |
<!-- Bewerkingsstatus van dit artikel wijzigen: --> |
||
<!-- 1. huidige statusregel verwijderen --> |
<!-- 1. huidige statusregel verwijderen --> |
||
<!-- 2. nieuwe status ontdoen van commentaarmarkering --> |
<!-- 2. nieuwe status ontdoen van commentaarmarkering --> |
||
<!-- Verwijder tenslotte, als de status "HRVM gebruiksklaar" is bereikt, deze commentaarregels --> |
<!-- Verwijder tenslotte, als de status "HRVM gebruiksklaar" is bereikt, deze commentaarregels --> |
||
| + | '''Het meest gebruikte systeem om het verkeer te monitoren is op dit moment nog steeds het detectiesysteem dat werkt met inductielussen. Vanwege zijn nauwkeurigheid is het een betrouwbaar en kosten effectief systeem. Belangrijke nadelen zijn dat het bij aanbrengen van de inductielussen een wegafzetting nodig is en dat het systeem niet flexibel is. Daarnaast wordt de levensduur van de inductielussen beperkt doordat bij vervanging van het wegdek de inductielussen verloren gaan.''' |
||
| − | |||
| − | '''Een radardetector meet het tijdverschil tussen het zenden en het ontvangen van radargolven en de frequentieverschuivingen. Het systeem registreert de intensiteiten, snelheden en verkeerssamenstelling. Het belangrijkste voordeel van het radardetectorsysteem is dat het flexibel is. Tevens is het te gebruiken als mobiel monitoringssysteem. Daarnaast wordt het verkeer slechts beperkt gehinderd bij installatie en onderhoud van het systeem.''' |
||
==Werkingsprincipe== |
==Werkingsprincipe== |
||
| + | [[Image:Inductielus.jpg|right|thumb|280px]] Een inductielus bestaat uit een lus van koperdraad die in of onder het wegdek is aangebracht. Bij asfalt- en betonwegen wordt een sleuf in het wegdek gefreesd, waarin de inductielus en de communicatie hardware wordt aangebracht. Bij elementverharding wordt de inductielus onder de verharding aangebracht. De inductielus is verbonden met een elektronische schakeling en bevat een spoel waarin een magnetisch veld wordt opgewekt met een frequentie van 40 tot 100 kHz. |
||
| − | [[Image:Radar2.jpg|right|thumb|300px|Bron: [http://www.vics.or.jp/english/ VICS]]] |
||
| − | Detectie van verkeer met behulp van een radardetector, is gebaseerd op het meten van het tijdverschil tussen het zenden en het ontvangen van radargolven en de frequentieverschuivingen. De detector zendt continu een elektromagnetisch signaal uit met een vaste frequentie (circa 10 of 24 GHz). Het uitgezonden signaal wordt gereflecteerd door stilstaande of bewegende objecten, waarna het gereflecteerde signaal door de radardetector weer wordt ontvangen. |
||
| + | De passage van een hoeveelheid metaal, zoals in een (vracht)auto, verandert de zelfinductiespanning in de inductielus, de coëfficiënt van de zelfinductie en de frequentie. Door deze verstoring van het magnetisch veld kan een voertuigpassage worden waargenomen. De gevoeligheid van de inductielus kan per lus worden afgesteld door de vorm van de lus aan te passen of het aantal windingen in de spoel te veranderen. Het afstellen van de gevoeligheid van de inductielussen luistert nauw. De inductielus dient zo te worden afgesteld dat voorkomen wordt dat voertuigen op de naastgelegen rijstrook worden gedetecteerd en dat (lichte) motorfietsen niet worden gedetecteerd. |
||
| − | Als het uitgezonden signaal wordt gereflecteerd door een object dat zich in de richting van het radarsignaal beweegt, dan verschilt de frequentie van het ontvangen signaal van de frequentie van het uitgezonden signaal. Vanwege dit zogeheten [http://nl.wikipedia.org/wiki/Dopplereffect Doppler-effect] kan de radardetector ook de snelheid van het voertuig meten doordat de frequentie van het signaal in dezelfde verhouding veranderd als de snelheid van het gedetecteerde object. Daarnaast kunnen zowel de objecten die naar de detector toe bewegen als die van de detector af bewegen worden gedetecteerd. De radardetector moet zodanig worden geïnstalleerd dat de stralingsbundel nagenoeg parallel aan de rijrichting loopt. De radardetector kan zowel voertuigen als voetgangers en fietsers detecteren. |
||
| + | Het inductielus detectiesysteem bestaat uit één of meer detectielussen, een lokale verwerkingsunit en eventueel een communicatiemodule om gegevens naar een centrale te sturen. Per rijstrook wordt een enkele lus of een luspaar aangebracht. De detectielussen registreren de voertuigbewegingen en geven deze door aan de lokale verwerkingsunit, ook wel het detectorstation genoemd. Deze unit kan de gegevens interpreteren en omvormen tot de gewenste variabelen zoals voertuigpassages en snelheden. |
||
| − | Naast de hierboven beschreven radardetector, bestaat er ook een radardetector die een signaal gebruikt met een wisselende frequentie en waarvan de werking niet op het Doppler-effect is gebaseerd. Dit type detector kan zowel bewegende objecten (>2 km/u) als stilstaande objecten detecteren, maar is niet geschikt voor het detecteren van voetgangers en fietsers. |
||
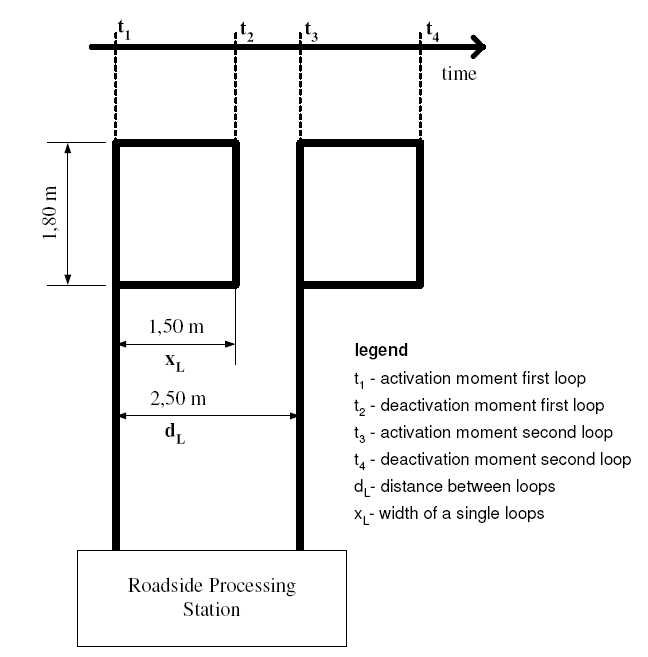
| + | Een enkele lus kan een passage van een voertuig meten, waardoor het aantal voertuig passages, de passage tijden en de bezettingsgraad kunnen worden geregistreerd. Van die gegevens kunnen vervolgens de [http://nl.wikipedia.org/wiki/Verkeersintensiteit intensiteit], de dichtheid en de harmonisch snelheid worden afgeleidt. Door twee lussen op korte afstand van elkaar te leggen (een luspaarkunnen nog een aantal extra zaken worden gemeten, waaronder individuele snelheden, rekenkundige gemiddelde snelheden, harmonische gemiddelde snelheden, individuele voertuiglengte en gemiddelde voertuiglengte. Behalve intensiteiten kunnen dus ook (gemiddelde) snelheden en voertuigcategorieën worden waargenomen. In onderstaande figuur is een schematische weergave van een dubbele inductielus opgenomen. |
||
| − | Voor de benaming van een radardetector worden ook wel microgolf detector, microwave detector of radio wave detector gebruikt. |
||
| ⚫ | |||
| − | De radardetector kan aan een mast langs de weg of aan een uithanger, portaal of viaduct boven de weg worden bevestigd. |
||
==Toepassing== |
==Toepassing== |
||
| + | Bij de meeste systemen worden de meetgegevens door de lokale verwerkingsunit geaggregeerd tot 1, 5, 15 of 60 minuten. De gegevens zijn dan verwerkt tot intensiteiten per voertuigklasse (op basis van de lengte van het voertuig) en gemiddelde snelheden per tijdsinterval. Doordat gewerkt wordt met een rekenkundig gemiddelde worden de snelheden bemeten met de inductielussen overschat. Dit is verder uitgewerkt in het verkeerskundige artikel over [[rekenkundige gemiddelde snelheden]]. Indien het systeem een communicatiemodule bevat, kunnen de geaggregeerde gegevens per tijdseenheid direct naar de centrale worden gestuurd en daar verwerkt worden. Een ander mogelijkheid is om de gegevens lokaal uit te lezen, bijvoorbeeld eens per week of maand met behulp van een laptop. |
||
| − | De kwaliteit van de detectie is sterk afhankelijk van de positie van de radardetector. De kijkhoek voor juiste registratie van intensiteiten en snelheden kan per radardetector verschillen. Een radardetector heeft een groot meetgebied, waardoor een goed beeld kan worden verkregen van de doorstroming van het verkeer. Vanaf circa 40 meter vanaf de radardetector kan het verkeer worden gedetecteerd en vanaf circa 150 meter kan het verkeer op meerdere rijstroken worden gedetecteerd. Technisch gezien kan een radardetector als hij goed is afgesteld en er geen andere belemmeringen zijn, het verkeer op tien rijstroken over een afstand van duizend meter te detecteren. Echter door de afscherming van de voertuigen door andere voertuigen en objecten ligt het bereik van de radardetector lager, in Japan bij het [[VICS - in-car verkeersinformatie in Japan|VICS project]] wordt een bereik van 70 meter gehanteerd. |
||
| + | Het Nederlandse (hoofd)wegennet is uitgerust met een uitgebreid monitoringssysteem, dat is gebaseerd op detectielussen. Dit systeem, [[MoniCa]] genoemd (Monitoring Casco), zorgt voor de verzameling, verwerking en verstrekking van dynamische en statische verkeersgegevens. Het zijn gegevens over intensiteiten, gemiddelde snelheden, voertuigcategorieën, files, spitsdrukte en spookrijdermeldingen. Via verschillende informatieketens ligt MoniCa aan de basis van de meeste [[Verkeersmonitoring voor Dynamisch Verkeersmanagement|DVM-maatregelen]], zoals waarschuwen voor langzaam rijdende of stilstaande voertuigen ([[automatische incidentdetectie]]), snelheidsmaatregelen (snelheidsdeken), weergave filelengtes op DRIPs etc. |
||
| ⚫ | |||
| + | [http://www.rijkswaterstaat.nl Rijkswaterstaat] heeft tevens een systeem met inductielussen ontwikkeld voor het bewaken van verkeersstromen. Dit verkeerssignaleringssysteem wordt aangeduid met MTM (Motorway Traffic Management) en is op verschillende autosnelwegen in Nederland geïnstalleerd. MTM is een volledig geautomatiseerd netwerkmanagementsysteem voor het hoofdwegennet. Dit wordt gebruikt voor de [[automatische incidentdetectie]] (AID), bij werk in uitvoering, bij beveiliging van defecte infrastructuur situaties, voor snelheidsmaateregel en voor de aansturing van onder meer [http://nl.wikipedia.org/wiki/Toeritdosering toeritdosering] en [http://nl.wikipedia.org/wiki/DRIP/ DRIP's] (via MoniCa). Op wegvlakken met MTM liggen om de 300 tot 500 meter detectielussen, op delen zonder MTM kent het MoniCa-systeem een lagere dichtheid van de meetlocaties. |
||
| − | Monitoringssystemen die gebruik maken van radardetectoren zijn volop in gebruik in Nederland. Op het hoofdwegennet wordt de monitoring van de verkeersstromen voornamelijk uitgevoerd met behulp van [[inductielussen]]. Op enkele locaties, zoals bij kunstwerken worden radardetectoren toegepast. Op lokaal niveau worden de radardetectoren vaker toegepast als alternatief voor inductielussen. In Noord-Brabant wordt radardetectie gebruikt in het project [[De informatieve weg - actuele verkeersborden in Noord-Brabant|de informatieve weg]], waarbij de weggebruikers via elektronische verkeersborden worden geïnformeerd over de actuele verkeerssituatie. De provincie Zuid-Holland gebruikt radardetectoren voor het [[Roadside radar|monitoren van het verkeer op de N206 en de N207]]. |
||
| + | Met behulp van de gegevens uit weggebonden meetsystemen (waaronder de inductielussen) kunnen de reistijden over een traject worden geschat. Voordat de reistijd gegevens echter beschikbaar zijn moeten de ingewonnen gegevens worden bewerkt met behulp van een algoritme. De werking van het reistijd algoritme is toegelicht in het artikel over [[bewerking m.b.v. algoritmes]]. |
||
| ⚫ | |||
| + | Daarnaast worden de inductielussen toegepast bij [http://nl.wikipedia.org/wiki/VRI VRI's]. De werkwijze van de inductielussen bij VRI's wordt verder toegelicht bij het monitoringssysteem [[verkeersregelinstallaties]] (VRI's). In de stedelijke omgeving wordt het systeem ook gebruikt bij de toegang tot parkeergarages en bij dynamische afsluitingen. |
||
| + | |||
| + | Onderzoek heeft aangetoond dat er meer mogelijk is met het inductielus detectiesysteem dan de toepassingen die momenteel worden gebruikt. De verstoring van het magnetisch veld blijkt per voertuig verschillend te zijn waardoor een soort handtekening wordt achtergelaten. Er is door verschillende instanties onderzoek uitgevoerd naaar de mogelijkheid om met behulp van deze ‘handtekening’ voertuigen te herkennen ten behoeve van reistijdmetingen. Onderzoeken zijn onder andere uitgevoerd door [[#Bronnen|Coifman en Cassidy]] van de University of California, door [[#Bronnen|Kwon]] van de universiteit van Minnesota en door [[#Bronnen|Sio-Song]] van een Franse overheidsinstelling. Doordat een match wordt gevonden tussen de gepasseerde voertuigen bij een eerste meting en de voertuigen bij een meetpunt verder stoomafwaarts kan de werkelijke reistijd en de trajectsnelheid bepaald worden. |
||
| + | |||
| ⚫ | |||
===Nauwkeurigheid=== |
===Nauwkeurigheid=== |
||
| + | Het inductielus detectiesysteem is een nauwkeurig systeem, ook bij extreme weersomstandigheden zoals overvloedige regenval en mist. Zware vorst kan de inductielussen echter wel aantasten en de metingen beïnvloeden, doordat de soortelijkeweerstand van de grond aanzienlijk kan toenemen. |
||
| − | De kwaliteit van de metingen is sterk afhankelijk van de positie van de detector. Bij het meten van intensiteiten zijn hogere nauwkeurigheden bereikbaar dan met lengtebepaling en snelheidsmetingen. De grootste nauwkeurigheid van de metingen is haalbaar als de radardetector recht boven de rijstrook wordt geplaatst, in de lengte richting van de rijbaan. |
||
| + | Bij langzaam rijdend verkeer (<20 km/u) wordt de nauwkeurigheid van het systeem minder. |
||
| − | De metingen van de radardetectoren worden nauwelijks beïnvloed door de weersomstandigheden. Indien de radardetector op een windgevoelige constructie wordt bevestigd kunnen trillingen de metingen beïnvloeden. Een lichtmast beweegt bijvoorbeeld door de wind en door passerende vrachtwagens, een portaal is veel stabieler. Daarnaast worden radardetectoren niet beïnvloed door veranderende lichtintensiteiten, zoals het verschil tussen dag en nacht, wat wel een nadeel is van [[verkeersmonitoring met infrarooddetectoren|infrarood-]] en [[verkeersmonitoring met detectiecamera’s|camera]]-detectoren. |
||
| + | |||
| + | Met de huidige technieken is het moeilijk om motorfietsen te detecteren. Hiervoor dient extra aandacht besteed te worden aan de juiste instelling van de gevoeligheid van de inductielus. Ook is de vorm en de positie van de inductielus ten opzichte van de markering en de kant van het wegdek van belang om te voorkomen dat de motorfietsen langs de inductielussen rijden. Een ander probleem is dat voertuigen die ter hoogte van de inductieielussen van rijstrook wisselen niet goed worden gemeten. |
||
| + | |||
| + | De werking van de inductielussen kan worden verstoord door niet goed afgeschermde elektrische installaties of zendmasten in de nabijheid. Daarnaast kan het lastig zijn om inductielussen toe te passen op plaatsen waar veel metaal aanwezig is, zoals bijvoorbeeld bij viaducten, nabij rails of bij betonnen constructies die zijn voorzien van wapening. Het aanwezige metaal verstoort het signaal van de meting. |
||
In de onderstaande tabel is een inschatting gegeven van de nauwkeurigheid van de diverse meetgegevens, deze eisen aan de nauwkeurigheid van de gegevens zijn afkomstig uit het rapport van [[#Bronnen|Polman]]. |
In de onderstaande tabel is een inschatting gegeven van de nauwkeurigheid van de diverse meetgegevens, deze eisen aan de nauwkeurigheid van de gegevens zijn afkomstig uit het rapport van [[#Bronnen|Polman]]. |
||
| Regel 48: | Regel 53: | ||
|- |
|- |
||
| style="width:80%;" |Snelheid |
| style="width:80%;" |Snelheid |
||
| − | | style="width:40%;" |96% |
+ | | style="width:40%;" |96% |
| + | |- |
||
| + | | style="width:80%;" |Lengte |
||
| + | | style="width:40%;" |95% |
||
| + | |- |
||
| + | | style="width:80%;" |Voertuigclassificatie |
||
| + | | style="width:40%;" |95% |
||
|} |
|} |
||
===Beschikbaarheid=== |
===Beschikbaarheid=== |
||
| + | De beschikbaarheid van het inductielussysteem is sterk afhankelijk van de kwaliteit van de wegverharding. Als er werking zit in de wegverharding kan door schuring en oprekking schade ontstaan aan de kabels. De kabels kunnen breken of kunnen bloot komen te liggen, waardoor water de werking kan verstoren. Vooral bij hoge percentages vrachtverkeer of op locaties met veel rembewegingen zijn inductielussen kwetsbaar. Daarnaast worden in veel situaties de problemen veroorzaakt door de verwerkingsunit of de communicatiemodule. In het rapport [[#Bronnen|van Polman] wordt gesteld dat het systeem tussen de 97 en 100% van de tijd beschikbaar is. Het rapport van [[#Bronnen|van Lint]] wordt aangegeven dat bij MoniCa bijvoorbeeld 12% van alle ruwe minuutgegevens (tijdgemiddelde snelheden en intensiteiten) ofwel onbetrouwbaar zijn of volledig missen. Daarnaast wordt door [[#Bronnen|van Lint]] aangegeven dat er regelmatig uitschieters van 25% of meer zijn, deze uitschieters worden vaak veroorzaakt door achterstallige onderhoudswerkzaamheden. |
||
| − | Het radardetectorsysteem registreert de gegevens binnen fracties van een seconde. Na ongeveer een minuut zijn de gegevens vervolgens verwerkt en beschikbaar voor gebruik. |
||
| − | + | Vanaf een fractie van een seconde na een voertuigpassage zijn de gegevens beschikbaar in het systeem. |
|
===Flexibiliteit=== |
===Flexibiliteit=== |
||
| + | De detectielussen zijn niet flexibel, omdat ze in het wegdek worden gefreesd. De infrastructuur wordt echter steeds dynamischer gebruikt, zoals bij [http://nl.wikipedia.org/wiki/Spitsstrook spitsstroken] en [http://nl.wikipedia.org/wiki/Dynamische_wegmarkering dynamische rijbaanmarkering]. Maar bijvoorbeeld ook bij wegverleggingen tijdens werk in uitvoering kunnen detectielussen het verkeer niet goed monitoren. |
||
| − | De radardetectorsystemen zijn flexibel af te stellen of in te richten, afhankelijk van de situatie. De ligging en de vorm van het detectieveld zijn zonder verplaatsing van de radardetector moeilijk te veranderen. Het systeem kan daarnaast als mobiele installatie worden gebruikt, bijvoorbeeld tijdens wegwerkzaamheden. De apparatuur hoeft niet, zoals bij inductielussen, in het wegdek worden opgenomen en kan daardoor - indien noodzakelijk - ook na installatie nog worden verplaatst. Aan deze verplaatsing zijn natuurlijk wel kosten verbonden, in verband met verwijdering en installatie en het opnieuw afstellen van de detectoren en de apparatuur. |
||
===Gegevenstype=== |
===Gegevenstype=== |
||
| − | Per rijstrook kunnen de volgende gegevens worden gemeten met de |
+ | Per rijstrook kunnen de volgende gegevens worden gemeten met de detectielussen (lusparen): |
| − | * intensiteit |
+ | * intensiteit; |
| − | * snelheid |
+ | * snelheid; |
| + | * lengte van het voertuig, waarmee de voertuigcategorie kan worden bepaald; |
||
| − | * aanwezigheid voertuig, |
||
| − | * |
+ | * passage, waarmee de volgafstanden en de volgtijden kunnen worden bepaald. |
| + | |||
| + | (MoniCa) inductielussen berekenen de rekenkundig gemiddelde snelheid op een locatie, deze rekenkundige gemiddelde snelheden geven echter een overschatting van de werkelijke snelheden over een traject. In het verkeerskundige artikel over [[rekenkundig gemiddelde snelheden]] wordt hier verder op ingegaan. |
||
===Realisatie=== |
===Realisatie=== |
||
| − | Bij de implementatie van het |
+ | Bij de implementatie van het systeem moet rekening worden gehouden met een doorlooptijd van enkele maanden, in verband met de levertijd, het frezen van de inductielussen in het asfalt en het in werking stellen van het systeem. |
===Onderhoud=== |
===Onderhoud=== |
||
| + | Door het directe contact van de inductielussen met de voertuigen is het meetsysteem kwetsbaar bij hoge percentages vrachtverkeer en op locaties waar veel rembewegingen worden uitgevoerd. |
||
| − | Radardetectoren zijn onderhoudsarm. Het onderhoud van de radardetectoren is gemakkelijker en goedkoper, dan bij [[verkeersmonitoring met inductielussen|lusdetectoren]], aangezien er geen ingrepen in de weg noodzakelijk zijn. Indien de detectoren recht boven de rijbaan worden geplaatst of op masten dicht langs de rijbaan, is afsluiting van één of meerdere rijstroken noodzakelijk, de duur van de afsluiting duurt wel korter dan bij het onderhoud aan inductielussen. |
||
| + | |||
| + | Vooral doordat een wegafzetting benodigd is bij onderhoud aan de inductielussen is een inductielus een duur meetsysteem om te onderhouden. De jaarlijkse kosten voor afschrijving en onderhoud voor de inductielussen liggen in de orde grootte van 10.000 euro per lus en 20.000 euro de centrale verwerkingsapparatuur en de communicatie infrastructuur. Naast de directe kosten voor een wegafzetting heeft het afsluiten van een rijstrook ook negatieve effecten heeft op de doorstroming van het verkeer, wat voor economische schade zorgt. Uit oogpunt van de kosten en de verkeersoverlast wordt bij een defecte inductielus vaak gewacht met de herstelwerkzaamheden totdat er meerdere lussen hersteld moeten worden. |
||
===Kosten=== |
===Kosten=== |
||
| + | De kosten van een inductielus detectiesysteem zijn afhankelijk van het aantal detectielussen, het aantal rijstroken en de communicatie-infrastructuur. In het algemeen geldt dat inductielussen relatief goedkoop zijn te maken en te installeren. De kosten voor de detectielussen en de lokale verwerkingsunit liggen in de ordegrootte van 8.000 tot 12.000 euro per locatie met één tot vier rijstroken [[#Bronnen|Bron: Gemeente Rotterdam]]. Een nadeel van inductielussen is echter dat de wegbeheerder de rijstroken tijdens de installatie tijdelijk moet afsluiten, aangezien de inductielussen en de communicatie hardware in het wegdek gefreesd moeten worden. De installatiekosten voor het gehele systeem zitten voornamelijk in de aanleg inclusief wegafzetting en de kosten voor de verwerkingsunit, deze zijn beperkt afhankelijk zijn van het aantal rijstroken. |
||
| − | De kosten van een radardetectorsysteem zijn afhankelijk van het aantal locaties, het aantal detectoren en de communicatie-infrastructuur. Voor een meetlocatie met zes rijstroken liggen de kosten voor de installatie en aanschaf van het systeem in de orde grootte van 30.000 euro. |
||
| + | |||
| + | Een detectielus heeft een lange levensduur, circa dertig jaar. De levensduur is echter gekoppeld aan de levensduur van de wegverharding waarin of waaronder de inductielus is aangebracht en deze meestal minder is dan dertig jaar. De verwerkingsunit heeft een levensduur van circa twintig jaar. |
||
==Referentieprojecten== |
==Referentieprojecten== |
||
| + | * [[RegioLab Delft]] |
||
| − | * [[VICS - in-car verkeersinformatie in Japan]] |
||
| + | * [[OLSIM - realtime verkeersvoorspellingen in Nordrhein-Westfalen]] |
||
| ⚫ | |||
| + | * [[Verkeersmanagement in en rond Barcelona]] |
||
| − | * [[Roadside radar]] |
||
| + | * [[MoRo - Verkeersmonitoring Rotterdam]] |
||
| ⚫ | |||
| + | * [[Haaglanden Mobiel]] |
||
==Bronnen== |
==Bronnen== |
||
| + | '''Bukkems en Folles''', ''Alternatieven voor lusdetectie'', ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, september 2002 |
||
| + | |||
| + | '''Coifman en Cassidy''', [http://www.ceegs.ohio-state.edu/~coifman/documents/VRI_basic.pdf ''Vehicle Reidentification and Travel Time Measurement onCongested Freeways''], Transportation Research Part A: Policy and Practice, 2002 |
||
| + | |||
| + | '''Bukkems en Folles''', ''Alternatieven voor lusdetectie'', ministerie van Verkeer en Waterstaat/Rijkswaterstaat |
||
| + | |||
'''Gemeente Rotterdam''', ''Monitoring Rotterdam DP3: Vergelijking potentiële meetsystemen'', Gemeente Rotterdam dS+V afdeling Verkeer en Vervoer, maart 2006 |
'''Gemeente Rotterdam''', ''Monitoring Rotterdam DP3: Vergelijking potentiële meetsystemen'', Gemeente Rotterdam dS+V afdeling Verkeer en Vervoer, maart 2006 |
||
| − | '''Hillen''', ''Monitoring ten behoeve van reistijdinformatie'', AGV in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, september 2006 |
+ | '''Hillen''', [http://www.rws-avv.nl/servlet/page?_pageid=116&_dad=portal30&_schema=PORTAL30&p_item_type=product&p_item_id=45058 ''Monitoring ten behoeve van reistijdinformatie''], AGV in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, september 2006 |
| + | |||
| + | '''Kwon''', [http://www.lrrb.org/pdf/200606.pdf ''Blind Deconvolution of Vehicle Inductance Signatures for Travel-Time Estimation''], University Minnesota Department of Transportation, februari 2006 |
||
| + | |||
| + | '''van Lint''', [http://www.rws-avv.nl/pls/portal30/docs/15455.PDF ''Evaluatie en analyse van reisinformatie''], Technische Universiteit Delft in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, maart-juni 2006 |
||
| + | |||
| + | '''van Lint''', ''Datafusie en toestand schatten: het maximale halen uit onbetrouwbare en heterogene verkeersgegevens'', PAO Cursus Regionale Verkeersmonitoring, november 2006 |
||
'''Schoemakers, Stemerding en van der Vlist''', ''Voertuigdetectie: wensen en mogelijkheden'', Goudappel Coffeng in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, november 2001 |
'''Schoemakers, Stemerding en van der Vlist''', ''Voertuigdetectie: wensen en mogelijkheden'', Goudappel Coffeng in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, november 2001 |
||
| + | |||
| + | '''Sio-Song''', [http://pubsindex.trb.org/document/view/default.asp?lbid=801332 ''Inductive-Loop-Based Vehicle Signature Features Analysis and Anonymous Vehicle Reidentification for Travel Time Estimation''], Transportation research 86th board annual meeting, 2007 |
||
'''Wilson''', ''Handboek verkeerslichtenregelingen'', CROW, januari 2006 |
'''Wilson''', ''Handboek verkeerslichtenregelingen'', CROW, januari 2006 |
||
==Openstaande vragen== |
==Openstaande vragen== |
||
| + | * Wat zijn de exacte kosten voor een meetsysteem met inductielussen? Hoe zijn deze kosten opgebouwd? |
||
| − | * Is het voor snelheidsmetingen noodzakelijk dat de radardetector in de lengterichting van de rijbaan staat gericht? |
||
| − | * Waar bestaat het onderhoud van radardetectoren uit? En hoe vaak moeten er onderhoudswerkzaamheden aan de detectoren plaatsvinden? |
||
| − | * Wat zijn de exacte kosten van een radardetectie systeem? |
||
-> Terug naar [[weggebonden meetsystemen]] |
-> Terug naar [[weggebonden meetsystemen]] |
||
Versie van 14 feb 2007 16:03
Het meest gebruikte systeem om het verkeer te monitoren is op dit moment nog steeds het detectiesysteem dat werkt met inductielussen. Vanwege zijn nauwkeurigheid is het een betrouwbaar en kosten effectief systeem. Belangrijke nadelen zijn dat het bij aanbrengen van de inductielussen een wegafzetting nodig is en dat het systeem niet flexibel is. Daarnaast wordt de levensduur van de inductielussen beperkt doordat bij vervanging van het wegdek de inductielussen verloren gaan.
Werkingsprincipe

{kind=link}
Een inductielus bestaat uit een lus van koperdraad die in of onder het wegdek is aangebracht. Bij asfalt- en betonwegen wordt een sleuf in het wegdek gefreesd, waarin de inductielus en de communicatie hardware wordt aangebracht. Bij elementverharding wordt de inductielus onder de verharding aangebracht. De inductielus is verbonden met een elektronische schakeling en bevat een spoel waarin een magnetisch veld wordt opgewekt met een frequentie van 40 tot 100 kHz.
De passage van een hoeveelheid metaal, zoals in een (vracht)auto, verandert de zelfinductiespanning in de inductielus, de coëfficiënt van de zelfinductie en de frequentie. Door deze verstoring van het magnetisch veld kan een voertuigpassage worden waargenomen. De gevoeligheid van de inductielus kan per lus worden afgesteld door de vorm van de lus aan te passen of het aantal windingen in de spoel te veranderen. Het afstellen van de gevoeligheid van de inductielussen luistert nauw. De inductielus dient zo te worden afgesteld dat voorkomen wordt dat voertuigen op de naastgelegen rijstrook worden gedetecteerd en dat (lichte) motorfietsen niet worden gedetecteerd.
Het inductielus detectiesysteem bestaat uit één of meer detectielussen, een lokale verwerkingsunit en eventueel een communicatiemodule om gegevens naar een centrale te sturen. Per rijstrook wordt een enkele lus of een luspaar aangebracht. De detectielussen registreren de voertuigbewegingen en geven deze door aan de lokale verwerkingsunit, ook wel het detectorstation genoemd. Deze unit kan de gegevens interpreteren en omvormen tot de gewenste variabelen zoals voertuigpassages en snelheden.
Een enkele lus kan een passage van een voertuig meten, waardoor het aantal voertuig passages, de passage tijden en de bezettingsgraad kunnen worden geregistreerd. Van die gegevens kunnen vervolgens de intensiteit, de dichtheid en de harmonisch snelheid worden afgeleidt. Door twee lussen op korte afstand van elkaar te leggen (een luspaarkunnen nog een aantal extra zaken worden gemeten, waaronder individuele snelheden, rekenkundige gemiddelde snelheden, harmonische gemiddelde snelheden, individuele voertuiglengte en gemiddelde voertuiglengte. Behalve intensiteiten kunnen dus ook (gemiddelde) snelheden en voertuigcategorieën worden waargenomen. In onderstaande figuur is een schematische weergave van een dubbele inductielus opgenomen.
{kind=link}
Bron: van Lint
Toepassing
Bij de meeste systemen worden de meetgegevens door de lokale verwerkingsunit geaggregeerd tot 1, 5, 15 of 60 minuten. De gegevens zijn dan verwerkt tot intensiteiten per voertuigklasse (op basis van de lengte van het voertuig) en gemiddelde snelheden per tijdsinterval. Doordat gewerkt wordt met een rekenkundig gemiddelde worden de snelheden bemeten met de inductielussen overschat. Dit is verder uitgewerkt in het verkeerskundige artikel over rekenkundige gemiddelde snelheden. Indien het systeem een communicatiemodule bevat, kunnen de geaggregeerde gegevens per tijdseenheid direct naar de centrale worden gestuurd en daar verwerkt worden. Een ander mogelijkheid is om de gegevens lokaal uit te lezen, bijvoorbeeld eens per week of maand met behulp van een laptop.
Het Nederlandse (hoofd)wegennet is uitgerust met een uitgebreid monitoringssysteem, dat is gebaseerd op detectielussen. Dit systeem, MoniCa genoemd (Monitoring Casco), zorgt voor de verzameling, verwerking en verstrekking van dynamische en statische verkeersgegevens. Het zijn gegevens over intensiteiten, gemiddelde snelheden, voertuigcategorieën, files, spitsdrukte en spookrijdermeldingen. Via verschillende informatieketens ligt MoniCa aan de basis van de meeste DVM-maatregelen, zoals waarschuwen voor langzaam rijdende of stilstaande voertuigen (automatische incidentdetectie), snelheidsmaatregelen (snelheidsdeken), weergave filelengtes op DRIPs etc.
Rijkswaterstaat heeft tevens een systeem met inductielussen ontwikkeld voor het bewaken van verkeersstromen. Dit verkeerssignaleringssysteem wordt aangeduid met MTM (Motorway Traffic Management) en is op verschillende autosnelwegen in Nederland geïnstalleerd. MTM is een volledig geautomatiseerd netwerkmanagementsysteem voor het hoofdwegennet. Dit wordt gebruikt voor de automatische incidentdetectie (AID), bij werk in uitvoering, bij beveiliging van defecte infrastructuur situaties, voor snelheidsmaateregel en voor de aansturing van onder meer toeritdosering en DRIP's (via MoniCa). Op wegvlakken met MTM liggen om de 300 tot 500 meter detectielussen, op delen zonder MTM kent het MoniCa-systeem een lagere dichtheid van de meetlocaties.
Met behulp van de gegevens uit weggebonden meetsystemen (waaronder de inductielussen) kunnen de reistijden over een traject worden geschat. Voordat de reistijd gegevens echter beschikbaar zijn moeten de ingewonnen gegevens worden bewerkt met behulp van een algoritme. De werking van het reistijd algoritme is toegelicht in het artikel over bewerking m.b.v. algoritmes.
Daarnaast worden de inductielussen toegepast bij VRI's. De werkwijze van de inductielussen bij VRI's wordt verder toegelicht bij het monitoringssysteem verkeersregelinstallaties (VRI's). In de stedelijke omgeving wordt het systeem ook gebruikt bij de toegang tot parkeergarages en bij dynamische afsluitingen.
Onderzoek heeft aangetoond dat er meer mogelijk is met het inductielus detectiesysteem dan de toepassingen die momenteel worden gebruikt. De verstoring van het magnetisch veld blijkt per voertuig verschillend te zijn waardoor een soort handtekening wordt achtergelaten. Er is door verschillende instanties onderzoek uitgevoerd naaar de mogelijkheid om met behulp van deze ‘handtekening’ voertuigen te herkennen ten behoeve van reistijdmetingen. Onderzoeken zijn onder andere uitgevoerd door Coifman en Cassidy van de University of California, door Kwon van de universiteit van Minnesota en door Sio-Song van een Franse overheidsinstelling. Doordat een match wordt gevonden tussen de gepasseerde voertuigen bij een eerste meting en de voertuigen bij een meetpunt verder stoomafwaarts kan de werkelijke reistijd en de trajectsnelheid bepaald worden.
Kenmerken
Nauwkeurigheid
Het inductielus detectiesysteem is een nauwkeurig systeem, ook bij extreme weersomstandigheden zoals overvloedige regenval en mist. Zware vorst kan de inductielussen echter wel aantasten en de metingen beïnvloeden, doordat de soortelijkeweerstand van de grond aanzienlijk kan toenemen.
Bij langzaam rijdend verkeer (<20 km/u) wordt de nauwkeurigheid van het systeem minder.
Met de huidige technieken is het moeilijk om motorfietsen te detecteren. Hiervoor dient extra aandacht besteed te worden aan de juiste instelling van de gevoeligheid van de inductielus. Ook is de vorm en de positie van de inductielus ten opzichte van de markering en de kant van het wegdek van belang om te voorkomen dat de motorfietsen langs de inductielussen rijden. Een ander probleem is dat voertuigen die ter hoogte van de inductieielussen van rijstrook wisselen niet goed worden gemeten.
De werking van de inductielussen kan worden verstoord door niet goed afgeschermde elektrische installaties of zendmasten in de nabijheid. Daarnaast kan het lastig zijn om inductielussen toe te passen op plaatsen waar veel metaal aanwezig is, zoals bijvoorbeeld bij viaducten, nabij rails of bij betonnen constructies die zijn voorzien van wapening. Het aanwezige metaal verstoort het signaal van de meting.
In de onderstaande tabel is een inschatting gegeven van de nauwkeurigheid van de diverse meetgegevens, deze eisen aan de nauwkeurigheid van de gegevens zijn afkomstig uit het rapport van Polman.
| Nauwkeurigheid | |
|---|---|
| Intensiteit | 95-98% |
| Snelheid | 96% |
| Lengte | 95% |
| Voertuigclassificatie | 95% |
Beschikbaarheid
De beschikbaarheid van het inductielussysteem is sterk afhankelijk van de kwaliteit van de wegverharding. Als er werking zit in de wegverharding kan door schuring en oprekking schade ontstaan aan de kabels. De kabels kunnen breken of kunnen bloot komen te liggen, waardoor water de werking kan verstoren. Vooral bij hoge percentages vrachtverkeer of op locaties met veel rembewegingen zijn inductielussen kwetsbaar. Daarnaast worden in veel situaties de problemen veroorzaakt door de verwerkingsunit of de communicatiemodule. In het rapport [[#Bronnen|van Polman] wordt gesteld dat het systeem tussen de 97 en 100% van de tijd beschikbaar is. Het rapport van van Lint wordt aangegeven dat bij MoniCa bijvoorbeeld 12% van alle ruwe minuutgegevens (tijdgemiddelde snelheden en intensiteiten) ofwel onbetrouwbaar zijn of volledig missen. Daarnaast wordt door van Lint aangegeven dat er regelmatig uitschieters van 25% of meer zijn, deze uitschieters worden vaak veroorzaakt door achterstallige onderhoudswerkzaamheden.
Vanaf een fractie van een seconde na een voertuigpassage zijn de gegevens beschikbaar in het systeem.
Flexibiliteit
De detectielussen zijn niet flexibel, omdat ze in het wegdek worden gefreesd. De infrastructuur wordt echter steeds dynamischer gebruikt, zoals bij spitsstroken en dynamische rijbaanmarkering. Maar bijvoorbeeld ook bij wegverleggingen tijdens werk in uitvoering kunnen detectielussen het verkeer niet goed monitoren.
Gegevenstype
Per rijstrook kunnen de volgende gegevens worden gemeten met de detectielussen (lusparen):
- intensiteit;
- snelheid;
- lengte van het voertuig, waarmee de voertuigcategorie kan worden bepaald;
- passage, waarmee de volgafstanden en de volgtijden kunnen worden bepaald.
(MoniCa) inductielussen berekenen de rekenkundig gemiddelde snelheid op een locatie, deze rekenkundige gemiddelde snelheden geven echter een overschatting van de werkelijke snelheden over een traject. In het verkeerskundige artikel over rekenkundig gemiddelde snelheden wordt hier verder op ingegaan.
Realisatie
Bij de implementatie van het systeem moet rekening worden gehouden met een doorlooptijd van enkele maanden, in verband met de levertijd, het frezen van de inductielussen in het asfalt en het in werking stellen van het systeem.
Onderhoud
Door het directe contact van de inductielussen met de voertuigen is het meetsysteem kwetsbaar bij hoge percentages vrachtverkeer en op locaties waar veel rembewegingen worden uitgevoerd.
Vooral doordat een wegafzetting benodigd is bij onderhoud aan de inductielussen is een inductielus een duur meetsysteem om te onderhouden. De jaarlijkse kosten voor afschrijving en onderhoud voor de inductielussen liggen in de orde grootte van 10.000 euro per lus en 20.000 euro de centrale verwerkingsapparatuur en de communicatie infrastructuur. Naast de directe kosten voor een wegafzetting heeft het afsluiten van een rijstrook ook negatieve effecten heeft op de doorstroming van het verkeer, wat voor economische schade zorgt. Uit oogpunt van de kosten en de verkeersoverlast wordt bij een defecte inductielus vaak gewacht met de herstelwerkzaamheden totdat er meerdere lussen hersteld moeten worden.
Kosten
De kosten van een inductielus detectiesysteem zijn afhankelijk van het aantal detectielussen, het aantal rijstroken en de communicatie-infrastructuur. In het algemeen geldt dat inductielussen relatief goedkoop zijn te maken en te installeren. De kosten voor de detectielussen en de lokale verwerkingsunit liggen in de ordegrootte van 8.000 tot 12.000 euro per locatie met één tot vier rijstroken Bron: Gemeente Rotterdam. Een nadeel van inductielussen is echter dat de wegbeheerder de rijstroken tijdens de installatie tijdelijk moet afsluiten, aangezien de inductielussen en de communicatie hardware in het wegdek gefreesd moeten worden. De installatiekosten voor het gehele systeem zitten voornamelijk in de aanleg inclusief wegafzetting en de kosten voor de verwerkingsunit, deze zijn beperkt afhankelijk zijn van het aantal rijstroken.
Een detectielus heeft een lange levensduur, circa dertig jaar. De levensduur is echter gekoppeld aan de levensduur van de wegverharding waarin of waaronder de inductielus is aangebracht en deze meestal minder is dan dertig jaar. De verwerkingsunit heeft een levensduur van circa twintig jaar.
Referentieprojecten
- RegioLab Delft
- OLSIM - realtime verkeersvoorspellingen in Nordrhein-Westfalen
- Verkeersmanagement in en rond Barcelona
- MoRo - Verkeersmonitoring Rotterdam
- De informatieve weg - Actuele verkeersborden in Noord-Brabant
- Haaglanden Mobiel
Bronnen
Bukkems en Folles, Alternatieven voor lusdetectie, ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, september 2002
Coifman en Cassidy, Vehicle Reidentification and Travel Time Measurement onCongested Freeways, Transportation Research Part A: Policy and Practice, 2002
Bukkems en Folles, Alternatieven voor lusdetectie, ministerie van Verkeer en Waterstaat/Rijkswaterstaat
Gemeente Rotterdam, Monitoring Rotterdam DP3: Vergelijking potentiële meetsystemen, Gemeente Rotterdam dS+V afdeling Verkeer en Vervoer, maart 2006
Hillen, Monitoring ten behoeve van reistijdinformatie, AGV in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, september 2006
Kwon, Blind Deconvolution of Vehicle Inductance Signatures for Travel-Time Estimation, University Minnesota Department of Transportation, februari 2006
van Lint, Evaluatie en analyse van reisinformatie, Technische Universiteit Delft in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, maart-juni 2006
van Lint, Datafusie en toestand schatten: het maximale halen uit onbetrouwbare en heterogene verkeersgegevens, PAO Cursus Regionale Verkeersmonitoring, november 2006
Schoemakers, Stemerding en van der Vlist, Voertuigdetectie: wensen en mogelijkheden, Goudappel Coffeng in opdracht van het ministerie van Verkeer en Waterstaat/Rijkswaterstaat Adviesdienst Verkeer en Vervoer, november 2001
Sio-Song, Inductive-Loop-Based Vehicle Signature Features Analysis and Anonymous Vehicle Reidentification for Travel Time Estimation, Transportation research 86th board annual meeting, 2007
Wilson, Handboek verkeerslichtenregelingen, CROW, januari 2006
Openstaande vragen
- Wat zijn de exacte kosten voor een meetsysteem met inductielussen? Hoe zijn deze kosten opgebouwd?
-> Terug naar weggebonden meetsystemen