Remote sensing is een techniek waarmee het wegverkeer vanaf grote hoogte kan worden waargenomen. De Technische Universiteit Delft voert momenteel een pilot uit, waarbij het verkeer op de snelweg vanuit een helikopter met camera's wordt gemonitord. Met deze beelden wordt informatie verkregen over het rijgedrag van de individuele autombilisten. Remote sensing levert niet alleen informatie op over het verkeer in een bepaalde situatie, er kan ook een beeld mee worden verkregen van het verloop van het wegverkeer over een langer traject.
Inleiding[]
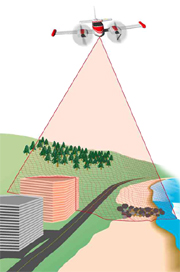
De betekenis van remote sensing in de brede zin van het woord, is het verzamelen van gegevens over het aardoppervlak via waarneming vanaf grote hoogte. Bijvoorbeeld door satellietbeelden of door waarneming waarbij gebruik wordt gemaakt van luchtballonnen, vliegtuigen, helikopters en hoge gebouwen. In de context van verkeersmonitoring is remote sensing het tracen van voertuigen met behulp van camera’s vanaf grote hoogten, zoals vanuit helikopters, vliegtuigen en vanaf gebouwen. Het gebruik van de huidige methoden voor verkeersmonitoring is beperkt tot het verkrijgen van informatie over de verkeersstromen en de voertuigen op een doorsnede. Met behulp van remote sensing kan een algeheel beeld worden gevormd van het individuele rijgedrag van de automobilisten op een traject. Op basis hiervan kunnen betere voorspellingen worden gedaan van de verkeerssituatie.
Pilots[]
Er worden momenteel verschillende pilots met de remote sensingtechniek uitgevoerd voor de monitoring van verkeer.

{kind=link}
Bron: ENVIMON Research Project
- Monitoring stedelijk gebied - ENVIMON (Finland)
- Door met een camera in een helikopter of vanaf een hoog gebouw beelden te maken, kan een overall beeld van de verkeerssituatie op bijvoorbeeld een kruispunt worden verkregen. Het doel is om met de beelden uit de camera een beeld te krijgen van de verkeersdruk op het bekeken gebied. Hiervoor is inzicht benodigd over de locaties van de voertuigen, het aantal voertuigen, de richtingen van de beweging van de voertuigen en de snelheden van de voertuigen. Binnen het project wordt met een digitale camera 25 beelden per seconden genomen. De beelden worden geroteerd, zodat de kijkhoek gelijk is aan het referentiebeeld. De beelden worden vervolgens gestabiliseerd met behulp van een kaart van het kruispunt. Vervolgens worden de beelden vergeleken met het referentiebeeld en worden de bewegende objecten gedetecteerd. Aan de hand hiervan worden de locaties en de bewegingen van de voertuigen getraceerd voertuigen en worden de snelheden bepaald. De verkregen gegevens worden vervolgens gebruikt voor verkeers- en infrastructuurplanning in het stedelijke gebieden.
- LUMOS - monitoring met vliegtuig (Duitsland)
{kind=link}
- In Berlijn is een pilot uitgevoerd waarbij met een infraroodcamera aan boord van een vliegtuig het verkeer werd gemonitord. Met behulp van de beelden uit de camera wordt inzicht verkregen in de schokgolven in de verkeersstromen en worden incidenten, die grote invloed op het verkeer hebben, gesignaleerd. Vanuit de lucht zijn deze twee aspecten sneller en beter waarneembaar dan vanaf het maaiveldniveau. De gegevens uit de camera wordt gekoppeld aan bestaande meetgegevens. Het doel is om met de gegevens uit de camera gekoppeld aan de bestaande gegevens een betere voorspelling van de verkeerssituatie te krijgen. Binnen het project is gekozen voor infraroodtechniek, omdat deze ook werkt bij duisternis en slecht weer. Nadeel van de techniek is wel de relatief lage resolutie van 768x500 pixels, hierdoor kan slechts een strook van 380 meter breedte worden gefilmd, met een resolutie van 0.5 m /pixel. De camerabeelden worden direct via 2Mbit/s radio-verbinding doorgestuurd naar een van de drie grondstations. Aan elk beeld worden de bijbehorende geografische gegevens gekoppeld. Om deze gegevens te kunnen bepalen hangen er twee meetinstrumenten bij de camera. Een GPS bepaalt de coördinaten van het vliegtuig en een ander instrument meet de rotatie ten opzichte van de drie assen. Op basis van deze zes parameters kunnen de coördinaten van het beeld worden berekend. Om vervolgens de voertuigen daadwerkelijk te herkennen wordt in het beeld gezocht naar bepaalde vormen die karakteristiek zijn voor de verschillende voertuigklassen. Deze analyse wordt voor elk beeld uitgevoerd, zodat ook stilstaande auto's worden gedetecteerd. Van alle gedetecteerde voertuigen wordt vervolgens de plausibiliteit gecheckt met behulp van eerdere en latere beelden. Door verschillende videobeelden te combineren, kunnen zowel plaats, snelheid en functie van de tijd worden bepaald. Deze individuele voertuiggevens kunnen worden geaggregeerd tot gemiddelde snelheden, dichtheden en reistijden. Deze informatie kan verder worden gebruikt voor simulatie en evalutie. Er moet hierbij worden opgemerkt dat de data uit het vliegtuig dienen als aanvulling op conventionele meetmethodes.
{kind=link}
Bron: NGSIM
- NGSIM (Verenigde Staten)
- Binnen het programma NGSIM (Next Generation SIMulation) wordt op hoge kwaliteit verkeersdata ingewonnen voor de ontwikkeling van rijgedrag algoritmes. Binnen het project worden de verkeersgegevens, voertuigtrajectorieën, ingewonnen met digitale videocamera’s die geplaatst staan op gebouwen van 30 verdiepingen hoog. De videocamera’s detecteren de voertuigen in het studiegebied. Bij de toepassing van de methode op de I-80 studie gebied beslaat een traject van 500 meter met 14 rijstroken. Met NG-VIDEO, een software programma ontwikkeld voor het NGSIM programma, worden de trajectorieën uit de videobeelden afgeleidt. Deze voertuigtrajectorieën geven voor elke tiende van een seconde aan op welke positie een voertuig zich bevindt binnen het studiegebied. Op deze manier wordt van elk voertuig duidelijk op welke rijstrook ze zich bevinden, welke snelheid ze hebben en wat de relatie is met de andere voertuigen. Binnen het NGSIM programma wordt de trajectorieën data onder andere gekoppeld aan geografische informatie, data uit inductielussen, ruwe videobeelden, VRI cyclussen op het onderliggend wegennet, weersgegevens. Met behulp van de ingewonnen gegevens worden verschillende algoritmes ontwikkeld, gevalideerd die uiteindelijk worden opgenomen in microsimulatie modellen.
- Tracing Congestion Dynamics (TU Delft)
- De TU Delft en de Adviesdienst Verkeer en Vervoer (AVV) werken samen aan een methode om, met behulp van trajectorieën verkregen uit camerabeelden genomen vanuit een helikopter, inzicht te krijgen in het rijgedrag van de voertuigen op het rijkswegennet. Onderstaande case ligt deze methode verder toe.
Case: Monitoring hoofdwegennet met een helikopter[]
De Nederlandse Organisatie voor Wetenschappelijk Onderzoek heeft een project lopen, getiteld Tracing Congestion Dynamics, with Innovatieve Microscopic Data to a Better Theory. De TU Delft werkt in dit onderzoeksproject samen met de Adviesdienst Verkeer en Vervoer van Rijkswaterstaat aan een methode om het rijgedrag van de automobilisten op het hoofdwegennet over grotere lengte vast te leggen. Dit project is een van de pilots op het gebied van remote sensing en wordt hieronder in detail toegelicht.
Werkingsprincipe[]
In het project van de TU Delft en AVV worden vanuit een helikopter foto-opnamen gemaakt van het verkeer op een wegvak van de snelweg. De heli hangt op één positie op een hoogte van ongeveer 500 meter. De digitale camera fotografeert met een frequentie van tien foto's per seconde het verkeer op het wegvak onder de helikopter. De foto's worden al tijdens de vlucht opgeslagen op een computer. Na de vlucht wordt het beeldmateriaal verwerkt tot bruikbare verkeersgegevens, de zogenoemde trajectorieën van de voertuigen. Tijdens de verwerking worden verschillende stappen doorlopen:
Bewerken van de camerabeelden
- correctie voor de vertekeningen van de lens,
- stabiliseren van de camerabeelden uit de voortdurend bewegende helikopter, zowel in de lengte-, breedte- als hoogterichting.

Detectie en identificatie van de voertuigen
- opstellen referentiebeeld,
- detecteren voertuigen (afwijkingen ten opzichte van het referentiebeeld).

Opstellen trajectorieën
- koppelen van de voertuigen op de reeks van beelden, zodat het afgelegde traject van het voertuig in de tijd bekend is,
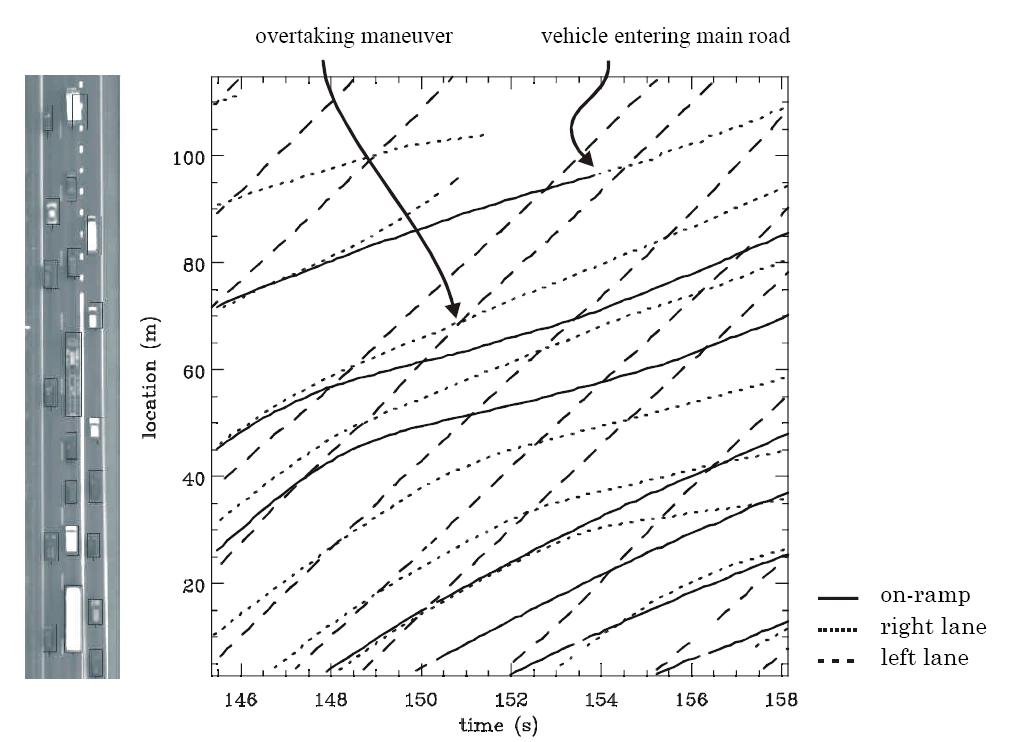
- in een weg-tijd diagram wordt voor elk voertuig aangegeven waar het zich op elk tijdstip bevindt.
Toepassing[]
Met de gegevens die uit de camerabeelden worden gehaald, kan onder meer onderzoek worden uitgevoerd naar het volggedrag van de automobilisten. Daarbij wordt dan extra aandacht besteed aan het verbeteren van de verkeersmodellen. Daarnaast wordt de methode gebruikt om meer inzicht te krijgen in het effect van verschillende weginrichtingsmaatregelen, zoals de spitsstroken en de 80 km/u-maatregel. Hierbij zijn voornamelijk de laterale posities van belang. Dit zijn de posities in de breedterichting van de weg, zoals rijstrookwisselingen. Verder zijn de volgafstanden van belang, in relatie tot de snelheid, intensiteit en verkeerssamenstelling. De methode kan tevens worden gebruikt om andere facetten van het rijden te onderzoeken, bijvoorbeeld het inhaalgedrag van automobilisten en het gedrag rond in- en uitvoegen van de autosnelweg.
Kenmerken[]
Nauwkeurigheid[]
In het remote sensingproject zijn nog allerlei ontwikkelingen in volle gang. Momenteel is het nog moeilijk om de beelden te bewerken als de lichtintensiteit tijdens de opnames sterk verandert. Daarnaast blijkt het systeem zeer gevoelig voor slecht weer. Bij slecht zicht kunnen geen opnames van grote hoogte worden gemaakt. Bij stormachtig weer kan de helikopter niet stil genoeg blijven hangen, waardoor het beeld te veel beweegt voor een goede verwerking. Daarnaast is het met de huidige programmatuur niet mogelijk om de voertuigen op wegen met een kromming te detecteren. Ontwikkelingen voor programmatuur die dit zal verbeteren zijn in een vergevorderd stadium.
Actualiteit[]
Het verwerken van het beeldmateriaal is arbeids- en tijdsintensief. De totale verwerking van de beelden tot bruikbare verkeersgegevens duurt ongeveer een maand.
Gegevens[]
Met de bewerkte camerabeelden kan informatie verkregen worden over:
- de positie op de weg,
- de snelheid,
- de versnelling en vertraging,
- de lengte en breedte van voertuigen,
- de volgafstand en volgtijd.
Flexibiliteit[]
Doordat gebruik gemaakt wordt van een helikopter kan de meetlocatie tijdens de meting worden aangepast, desgewenst aan de ontwikkelingen op het wegennet.
Realisatie[]
De meting brengt geen hinder voor het verkeer met zich mee, omdat geen apparatuur hoeft te worden geïnstalleerd.
Kosten[]
De kosten voor deze manier van monitoren liggen relatief hoog. Slechts voor een korte periode (maximaal 3 uur) kan het verkeer worden gemonitord. Voor deze periode moeten zowel het systeem als de helikopter worden gehuurd.
Bronnen[]
Ahola, Vehicle monitoring using digital video sequences, ENVIMON, 2005
Gorte, Karimi, Hoogendoorn, [Outline extraction of a motorway from helicopter image sequence, ISPRS workshop and the German Association for Pattern Recognition 2005
Hoogendoorn, van Zuylen, Schreuder, Gorte, Vosselman, Microscopic Traffic Data Collection by Remote Sensing, Transportation Research Board Annual Meeting 2003
Hoogendoorn, Schreuder, Tracing Congestion Dynamics with Remote Sensing, Transportation Research Board Annual Meeting 2005
Molinier, Häme, Ahola, 3D-Connected Components Analysis for Traffic Monitoring in Image Sequences Acquired from a Helicopter, 14th Scandinavian Conference on Image Analysis SCIA2005, 2005
Next Generation Simulation, Interstate 80 Freeway Dataset, NGSIM FactSheet, 2006
Ossen, Hoogendoorn, van Loon, Schreuder, Helikopter blikt op verkeer: Datacollectie vanuit de lucht levert schat aan nieuwe informatie, Verkeerskunde januari 2006
Tracing Congestion Dynamics, http://www.tracingcongestion.tudelft.nl
ENVIMON Research Project, http://virtual.vtt.fi/virtual/proj2/envimon/traffic.htm
LUMOS Luftunterstütztes Monitoring System, http://www.projekt-lumos.de
NGSIM, http://www.ngsim.fhwa.dot.gov/
Terug naar -> weggebonden meetsystemen